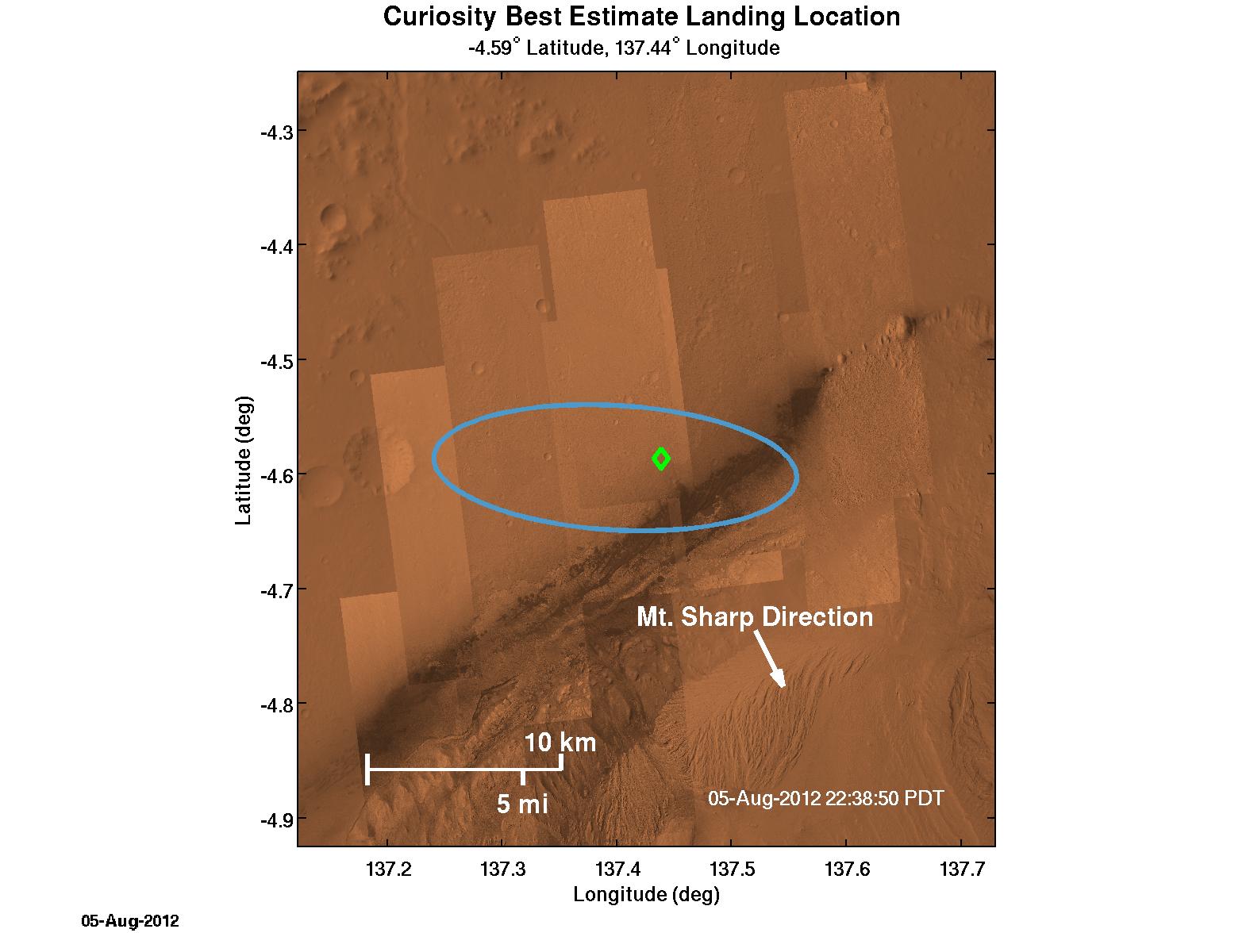
The area about Curiosity's landing ellipse was divided into 140
quadrangles measuring 1/40th of a degree on each side. The actual landing site was in quadrangle 51 which is shown in this image. There are placemarkers showing where the upper left corner of each quadrangle is.
In terms of distance the quadrangle is approximately square but somewhat rectangular with a linear conversion factor of about 60km/deg or 1km/amin. The averge values for the horizontal and vertical sides found by taking measurements in Google Mars and calculated using the ellipsoid for Mars are shown in the following image. The calculated conversion factors for changes in longitude and latitude are s
long and s
lat respectively. The factor s
lat assumes
geographic latitude. The linear approximation for the distance, Δs, between two points specified by angular coordinates would be,
Δs2 = slong2 Δlong2 + slat2 Δlat2.
The difference in scale in the two directions doesn't affect the result for the point where two lines of position intersect since λ, the fraction of the distance between the two ends of a line where the intercept is found, is not affected by a change of scale in either direction. I don't understand the discrepancy between the two results. Perhaps Google, JPL or the University of Arizona could help there. The calculation doesn't seem to be significantly affected by the distance below the ellipsoid. The figure of Mars is somewhat eggshaped with the southern pole radius a few kilometers less than that for the northern pole. But that shouldn't affect the equatorial region significantly.
The procedure for finding the intercept appears to be invariant w.r.t. changes in scale.
Supplemental (12 Aug): Headings are not invariant w.r.t. changes in scale lengths so headings computed using angular coordinates are only approximate. They should be computed for a plane in which all directions have the same scale of length.









































{kind=link}
{kind=link}
{kind=link}
{kind=link}